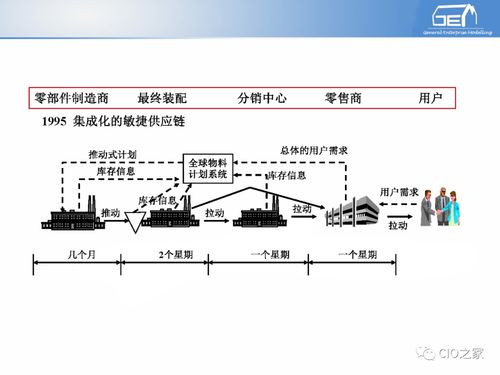
随着智能交通与自动驾驶技术的飞速发展,构建一个高效、可靠、安全的网络通信系统,以实现多车辆间的协同感知、决策共享,以及车辆与后方指挥中心的实时数据交互,已成为推动行业进步的核心基础设施。本方案旨在设计一套端到端的综合通信系统,并阐述其开发集成路径。
一、 系统总体架构
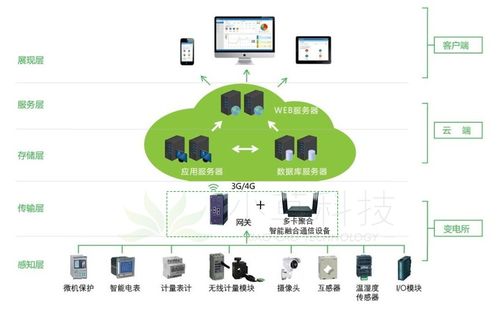
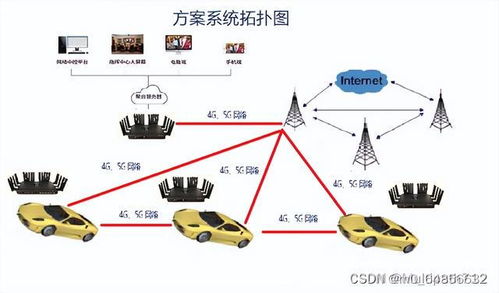
系统采用“云-管-边-端”四级分层架构,确保数据传输的低延迟、高带宽与广覆盖。
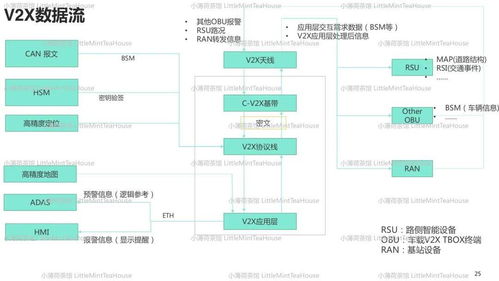
- 终端层(车端/路侧设备):由车载单元(OBU)、各类传感器(摄像头、雷达、定位模块)及路侧单元(RSU)构成。负责采集车辆状态、环境感知、高清视频等海量原始数据,并进行初步的预处理与格式标准化。
- 边缘层:部署于区域基站或交通枢纽附近的边缘计算节点(MEC)。负责处理对时延极为敏感的业务,如车辆间的实时协同预警(V2V)、局部交通流优化,并对上传数据进行聚合、过滤与轻量化,减轻核心网压力。
- 网络管道层:综合利用多种通信技术,形成异构融合的网络通道。
- 短距直连通信:采用DSRC或C-V2X PC5接口,实现车辆与车辆(V2V)、车辆与基础设施(V2I)间毫秒级、高可靠的低延迟直接通信,适用于安全预警等关键业务。
- 广域蜂窝通信:基于4G/5G(及未来5.5G/6G)网络,特别是利用5G网络切片技术,为车辆与指挥中心(V2N)的大带宽、远距离数据传输(如高清视频回传、批量状态上报、高精地图下载)提供保障。
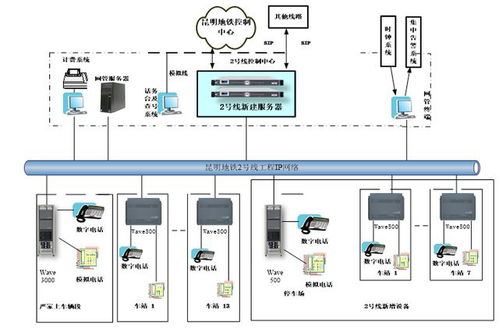
- 云端平台层(指挥中心):构建于云计算平台之上,包含数据中心、业务中台与指挥调度平台。负责海量数据的存储、深度分析与挖掘,实现全局交通监控、宏观调度、远程诊断、OTA升级以及面向公众的信息服务。
二、 数据传输与通信协议
- 数据类型与QoS分级:对数据进行分类并匹配差异化服务质量(QoS)。
- 安全类数据(如碰撞预警):最高优先级,要求极低时延(<20ms)与超高可靠性,优先通过直连C-V2X传输。
- 控制类数据(如调度指令、协同驾驶):中等优先级,要求低时延与高可靠,可通过5G uRLLC切片或C-V2X传输。
- 信息类数据(如状态上报、交通信息):允许一定时延,通过4G/5G eMBB切片传输。
- 娱乐与高带宽数据(如高清视频监控):大带宽需求,通过5G eMBB切片传输。
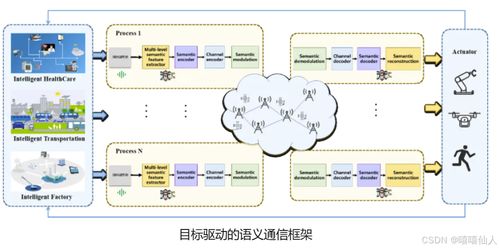
- 协议栈:应用层采用行业标准或自定义协议,如基于JSON或Protocol Buffers的消息格式;网络层支持IPv6,以满足海量设备地址需求;接入层适配多种无线空口协议。
三、 通信系统关键技术与安全机制
- 关键技术:
- 网络切片:在统一的5G物理网络上逻辑隔离出多个虚拟网络,分别服务于安全、控制、信息等不同业务,保障关键业务性能。
- 移动边缘计算(MEC):将计算能力下沉至网络边缘,大幅减少业务响应时间,并降低回传带宽消耗。
- 多接入边缘计算(MEC)与融合:实现C-V2X与5G网络在边缘侧的协同与数据融合。
- 安全机制:建立从终端到云端的纵深防御体系。包括:基于公钥基础设施(PKI)的数字证书实现车辆、RSU、服务器的双向认证;应用层数据加密传输;入侵检测与防御系统(IDS/IPS);以及定期的安全漏洞扫描与固件安全更新机制。
四、 系统开发与集成策略
- 分层开发与模块化设计:遵循软件定义汽车(SDV)理念,将通信功能模块化(如协议栈模块、安全模块、设备管理模块),降低耦合度,便于独立开发、测试与升级。
- 硬件与软件集成:
- 硬件选型:选择支持多模通信(如5G + C-V2X)的车载通信模组及高性能路侧设备。
- 软件集成:开发统一的设备接入与管理平台,集成协议栈、驱动、中间件及上层应用。利用容器化技术(如Docker)部署边缘应用,提升部署灵活性与资源利用率。
- 测试与验证:构建从实验室仿真(使用网络模拟器、车辆运动模型)、封闭场地测试到开放道路示范的递进式测试验证体系。重点测试高并发场景下的系统稳定性、异构网络切换的平滑性以及端到端安全性能。
- 标准遵循与生态合作:积极采纳3GPP、IEEE、CCSA等国内外相关通信标准,确保系统互联互通。与芯片厂商、设备供应商、电信运营商及整车企业建立紧密的产业合作生态。
五、 与展望
本方案提出的多层次、多技术融合的通信系统,能够有效满足智能网联汽车时代对数据传输的多元化需求。未来的开发集成工作需持续关注通信技术的演进(如5.5G/6G、卫星互联网),并深化人工智能在数据压缩、网络智能调度与安全威胁感知方面的应用,最终构建一个更智能、更坚韧、更普惠的车路云一体化网络。