无人机技术的快速发展,使其在航拍测绘、农业植保、应急救援、物流配送等领域的应用日益广泛。其中,飞行控制系统是无人机的“大脑”,而相机与通信系统则是其关键的“感官”与“神经”。将高性能相机与高可靠通信系统无缝集成到飞行控制系统中,是提升无人机智能化、自动化水平与任务效能的核心环节。本文旨在探讨这一集成开发过程中的关键技术、挑战与协同设计思路。
一、 相机集成:从数据采集到智能感知
在飞行控制系统中集成相机,远非简单的物理搭载。其核心在于实现视觉数据与控制指令的闭环。
- 硬件接口与同步:需解决相机(包括可见光、红外、多光谱等)与飞控主处理器之间的高速数据接口问题,如MIPI CSI-2、USB 3.0等。更重要的是时间同步,需通过硬件触发或精确的软件时间戳,确保每一帧图像数据都带有精确的GPS时间(或其他全局时间源),以便与飞控的位姿(位置、姿态)数据严格对齐,为后续处理奠定基础。
- 数据处理与低延迟:相机产生的海量图像数据需要高效处理。集成方案需考虑在飞控端进行初步的图像预处理(如畸变校正、降噪)甚至关键特征提取,以减轻数据下行压力和后续处理负担。对于实时目标跟踪、避障等应用,数据处理链路的低延迟至关重要。
- 智能算法嵌入:现代无人机飞控正逐渐融入计算机视觉算法。集成相机时,需考虑如何在飞控的有限计算资源上部署轻量化的视觉SLAM(同步定位与建图)、目标识别、视觉伺服等算法,使无人机具备环境理解与自主决策能力。
二、 通信系统集成:构建可靠的数据链路
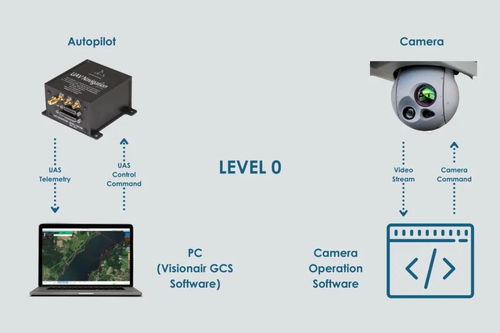
通信系统是无人机与地面站、其他无人机或云平台交互的纽带,其集成质量直接关乎操控安全与数据实效。
- 多链路融合与冗余设计:典型的无人机通信系统包括:用于遥控指令与关键遥测传输的高可靠、低延迟数传电台(如2.4GHz/900MHz),以及用于高清图像/视频等大数据量下行的图传链路(如5.8GHz Wi-Fi或COFDM)。集成开发需实现双链路甚至多链路(如加入4G/5G蜂窝网络作为备份)的智能管理与无缝切换,确保在复杂电磁环境或遮挡情况下的链路持续性。
- 协议栈定制与优化:通信协议栈需要深度定制以适应航空环境。这包括:
- 数据分包与优先级调度:对飞控状态数据、相机控制指令、图像流数据等不同优先级的信息进行差异化传输保障。
- 前向纠错与抗干扰:针对无线信道特点,采用强健的编码和调制技术,提升抗干扰与抗衰落能力。
- 加密与安全认证:集成硬件或软件加密模块,防止数据窃取与非法控制。
- 与飞控的深度交互:通信系统状态(如信号强度、链路质量、延迟)应实时反馈给飞控。飞控可根据链路质量自适应调整飞行策略,例如在信号弱时自动执行返航或悬停,实现通信感知的自主飞行安全。
三、 相机与通信系统的协同集成开发
真正的集成挑战在于让相机系统与通信系统在飞控的统一调度下高效协同工作。
- 带宽的智能分配与管理:这是协同集成的核心矛盾。高清、高帧率相机会产生巨大数据流,而通信带宽有限。集成方案需实现动态带宽分配:
- 码率自适应:图传系统根据当前链路质量和任务需求,动态调整视频编码的码率与分辨率。
- 兴趣区域(ROI)编码:结合机载视觉分析结果,仅对图像中的关键区域(如检测到的目标)进行高码率传输,背景区域则采用低码率,从而大幅节省带宽。
- 任务触发式传输:非关键时段仅传输低帧率预览流或缩略图,当识别到特定事件(如发现异常)时,再自动触发高清原始数据或高帧率流传输。
- 端到端延迟优化:从相机曝光到图像在地面站显示,整个链条的延迟必须最小化,尤其对于第一人称视角(FPV)飞行或精准操控。这需要相机采集、机内处理、编码、无线传输、地面解码与显示各环节的紧密协同与优化。
- 统一的数据与时间框架:飞控、相机、通信系统必须运行在统一的时间基准和坐标系下。所有数据(姿态、位置、图像帧、控制指令)都应带有同步时标,以便在地面站或云端进行精准的数据融合与事后分析。
四、 开发挑战与未来趋势
集成开发面临计算资源、功耗、尺寸重量(SWaP)以及复杂电磁兼容性(EMC)的多重约束。未来发展趋势将聚焦于:
- 异构计算平台的应用:采用集成了CPU、GPU、DSP、神经网络加速器的SoC芯片,高效处理飞行控制、视觉与通信任务。
- 软件定义无线电(SDR)与认知无线电:使通信系统能动态感知频谱环境并自适应调整参数,提升频谱利用率和抗干扰能力。
- AI驱动的全栈优化:利用人工智能技术,从图像采集策略、压缩编码模式到通信链路选择进行全局联合优化,实现任务效能的最大化。
- 云-边-端协同:将部分计算密集型任务(如大规模地图构建、复杂模型推理)卸载到边缘服务器或云端,机载系统专注于实时性要求高的任务,通过5G等高速链路实现协同。
无人机飞行控制系统中的相机与通信系统集成,是一个涉及硬件、软件、算法、协议的复杂系统工程。成功的集成不是简单的功能叠加,而是基于任务需求的深度耦合与协同设计。通过构建一个低延迟、高可靠、智能自适应的“感知-通信-控制”一体化平台,方能充分释放无人机的应用潜力,推动其向更高层次的自主化与智能化迈进。


![代码base '未来视角模拟区域前瞻项给PDF详注_好']](/uploads/image_117725/202605/23/2118bc026d00f2157f12e632d0c0bca5-329x210.jpg)